pCloudは買い切り型のプライベートクラウドです!
pCloud ー 最も安全なクラウドストレージ
ちょいちょいセールをしているので、お買い得な時に買ってしまうのがオススメです。私は前回のブラックフライデーセールで購入しました。
そのpCloudにはなんとLinux CLI用が用意されています。素晴らしいですね、これをRaspberry PIでも使えないか、試してみることにします。
元々Intel系のCPUでしか検証されていないらしいのですが、さてラズパイARM 用の pCloud CLIは動くでしょうか?
もしNetworkにつながった時点でドラレコ動画やGPSロガーの情報をクラウドにアップロードできれば最高です。ではインストールしてみましょう。
ソースコードとインストール方法の説明は以下にあります。
github.com
ではまずはビルドのための環境構築。
pi@raspberrypi:~ $ sudo apt-get install cmake zlib1g-dev libboost-system-dev libboost-program-options-dev libpthread-stubs0-dev libfuse-dev libudev-dev fuse build-essential git
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
libpthread-stubs0-dev is already the newest version (0.4-1).
libpthread-stubs0-dev set to manually installed.
libudev-dev is already the newest version (247.3-7+rpi1+deb11u1).
libudev-dev set to manually installed.
zlib1g-dev is already the newest version (1:1.2.11.dfsg-2+deb11u2).
cmake is already the newest version (3.18.4-2+rpt1+rpi1+deb11u1).
The following packages were automatically installed and are no longer required:
libevent-core-2.1-7 libevent-pthreads-2.1-7 libopts25 raspinfo sntp
Use 'sudo apt autoremove' to remove them.
Suggested packages:
libboost1.74-doc libboost-atomic1.74-dev libboost-chrono1.74-dev libboost-container1.74-dev libboost-context1.74-dev libboost-contract1.74-dev libboost-coroutine1.74-dev libboost-date-time1.74-dev libboost-exception1.74-dev libboost-fiber1.74-dev libboost-filesystem1.74-dev libboost-graph1.74-dev libboost-graph-parallel1.74-dev
libboost-iostreams1.74-dev libboost-locale1.74-dev libboost-log1.74-dev libboost-math1.74-dev libboost-mpi1.74-dev libboost-mpi-python1.74-dev libboost-numpy1.74-dev libboost-python1.74-dev libboost-random1.74-dev libboost-regex1.74-dev libboost-serialization1.74-dev libboost-stacktrace1.74-dev libboost-test1.74-dev
libboost-thread1.74-dev libboost-timer1.74-dev libboost-type-erasure1.74-dev libboost-wave1.74-dev libboost1.74-tools-dev libmpfrc++-dev libntl-dev libboost-nowide1.74-dev
The following NEW packages will be installed:
libboost-program-options-dev libboost-program-options1.74-dev libboost-system-dev libboost-system1.74-dev libboost-system1.74.0 libboost1.74-dev libfuse-dev
0 upgraded, 7 newly installed, 0 to remove and 0 not upgraded.
Need to get 11.4 MB of archives.
After this operation, 156 MB of additional disk space will be used.
Get:1 http://ftp.jaist.ac.jp/pub/Linux/raspbian-archive/raspbian bullseye/main armhf libboost1.74-dev armhf 1.74.0-9 [9,534 kB]
Get:2 http://ftp.jaist.ac.jp/pub/Linux/raspbian-archive/raspbian bullseye/main armhf libboost-program-options1.74-dev armhf 1.74.0-9 [374 kB]
Get:3 http://raspbian.raspberrypi.org/raspbian bullseye/main armhf libboost-program-options-dev armhf 1.74.0.3+b1 [4,616 B]
Get:4 http://ftp.jaist.ac.jp/pub/Linux/raspbian-archive/raspbian bullseye/main armhf libboost-system1.74.0 armhf 1.74.0-9 [242 kB]
Get:5 http://ftp.jaist.ac.jp/pub/Linux/raspbian-archive/raspbian bullseye/main armhf libboost-system1.74-dev armhf 1.74.0-9 [243 kB]
Get:6 http://raspbian.raspberrypi.org/raspbian bullseye/main armhf libboost-system-dev armhf 1.74.0.3+b1 [4,744 B]
Get:7 http://ftp.jaist.ac.jp/pub/Linux/raspbian-archive/raspbian bullseye/main armhf libfuse-dev armhf 2.9.9-5 [1,018 kB]
Fetched 11.4 MB in 8s (1,367 kB/s)
Selecting previously unselected package libboost1.74-dev:armhf.
(Reading database ... 123565 files and directories currently installed.)
Preparing to unpack .../0-libboost1.74-dev_1.74.0-9_armhf.deb ...
Unpacking libboost1.74-dev:armhf (1.74.0-9) ...
Selecting previously unselected package libboost-program-options1.74-dev:armhf.
Preparing to unpack .../1-libboost-program-options1.74-dev_1.74.0-9_armhf.deb ...
Unpacking libboost-program-options1.74-dev:armhf (1.74.0-9) ...
Selecting previously unselected package libboost-program-options-dev:armhf.
Preparing to unpack .../2-libboost-program-options-dev_1.74.0.3+b1_armhf.deb ...
Unpacking libboost-program-options-dev:armhf (1.74.0.3+b1) ...
Selecting previously unselected package libboost-system1.74.0:armhf.
Preparing to unpack .../3-libboost-system1.74.0_1.74.0-9_armhf.deb ...
Unpacking libboost-system1.74.0:armhf (1.74.0-9) ...
Selecting previously unselected package libboost-system1.74-dev:armhf.
Preparing to unpack .../4-libboost-system1.74-dev_1.74.0-9_armhf.deb ...
Unpacking libboost-system1.74-dev:armhf (1.74.0-9) ...
Selecting previously unselected package libboost-system-dev:armhf.
Preparing to unpack .../5-libboost-system-dev_1.74.0.3+b1_armhf.deb ...
Unpacking libboost-system-dev:armhf (1.74.0.3+b1) ...
Selecting previously unselected package libfuse-dev:armhf.
Preparing to unpack .../6-libfuse-dev_2.9.9-5_armhf.deb ...
Unpacking libfuse-dev:armhf (2.9.9-5) ...
Setting up libboost-system1.74.0:armhf (1.74.0-9) ...
Setting up libboost1.74-dev:armhf (1.74.0-9) ...
Setting up libfuse-dev:armhf (2.9.9-5) ...
Setting up libboost-program-options1.74-dev:armhf (1.74.0-9) ...
Setting up libboost-program-options-dev:armhf (1.74.0.3+b1) ...
Setting up libboost-system1.74-dev:armhf (1.74.0-9) ...
Setting up libboost-system-dev:armhf (1.74.0.3+b1) ...
Processing triggers for libc-bin (2.31-13+rpt2+rpi1+deb11u5) ...
作業用ディレクトリ作成して、
pi@raspberrypi:~ $ mkdir console-client
ソースコードをクローンしてきます。
pi@raspberrypi:~ $ git clone https://github.com/pcloudcom/console-client.git ./console-client/
Cloning into './console-client'...
remote: Enumerating objects: 8217, done.
remote: Counting objects: 100% (89/89), done.
remote: Compressing objects: 100% (68/68), done.
remote: Total 8217 (delta 28), reused 67 (delta 21), pack-reused 8128
Receiving objects: 100% (8217/8217), 22.39 MiB | 3.03 MiB/s, done.
Resolving deltas: 100% (5788/5788), done.
Updating files: 100% (1552/1552), done.
ソースのビルド
pi@raspberrypi:~/console-client/pCloudCC/lib/pclsync $ make fs
gcc -Wall -Wpointer-arith -O2 -g -fno-stack-protector -fomit-frame-pointer -mtune=core2 -I../sqlite -DP_ELECTRON -fPIC -DP_OS_LINUX -D_FILE_OFFSET_BITS=64 -DP_SSL_MBEDTLS -I../mbedtls/include -c -o pcompat.o pcompat.c
cc1: error: unrecognized -mtune target: core2
cc1: note: valid arguments are: arm8 arm810 strongarm strongarm110 fa526 fa626 arm7tdmi arm7tdmi-s arm710t arm720t arm740t arm9 arm9tdmi arm920t arm920 arm922t arm940t ep9312 arm10tdmi arm1020t arm9e arm946e-s arm966e-s arm968e-s arm10e arm1020e arm1022e xscale iwmmxt iwmmxt2 fa606te fa626te fmp626 fa726te arm926ej-s arm1026ej-s arm1136j-s arm1136jf-s arm1176jz-s arm1176jzf-s mpcorenovfp mpcore arm1156t2-s arm1156t2f-s cortex-m1 cortex-m0 cortex-m0plus cortex-m1.small-multiply cortex-m0.small-multiply cortex-m0plus.small-multiply generic-armv7-a cortex-a5 cortex-a7 cortex-a8 cortex-a9 cortex-a12 cortex-a15 cortex-a17 cortex-r4 cortex-r4f cortex-r5 cortex-r7 cortex-r8 cortex-m7 cortex-m4 cortex-m3 marvell-pj4 cortex-a15.cortex-a7 cortex-a17.cortex-a7 cortex-a32 cortex-a35 cortex-a53 cortex-a57 cortex-a72 cortex-a73 exynos-m1 xgene1 cortex-a57.cortex-a53 cortex-a72.cortex-a53 cortex-a73.cortex-a35 cortex-a73.cortex-a53 cortex-a55 cortex-a75 cortex-a76 cortex-a76ae cortex-a77 neoverse-n1 cortex-a75.cortex-a55 cortex-a76.cortex-a55 neoverse-v1 neoverse-n2 cortex-m23 cortex-m33 cortex-m35p cortex-m55 cortex-r52 native
make: *** [<builtin>: pcompat.o] Error 1
おっとここでエラーです。
cc1: error: unrecognized -mtune target: core2
というエラーが出ています。
Google検索したところ、イシューが挙がってました。
pCloud CLI for ARM · Issue #175 · pcloudcom/console-client · GitHub
-mtune=native に変更しましょう。nativeはコンパイラがビルドコンピュータの CPU を自動検出するモードです。
ちなみに、Raspberry Pi Zero 2 WのCPUは以下の通りでした。
pi@raspberrypi:~/console-client/pCloudCC/lib/pclsync $ uname -a
Linux raspberrypi 5.15.84-v7+ #1613 SMP Thu Jan 5 11:59:48 GMT 2023 armv7l GNU/Linux
Makefileを開き、
CFLAGS=-Wall -Wpointer-arith -O2 -g -fno-stack-protector -fomit-frame-pointer -mtune=core2 -I../sqlite -DP_ELECTRON -fPIC
となっていることころ
CFLAGS=-Wall -Wpointer-arith -O2 -g -fno-stack-protector -fomit-frame-pointer -mtune=native -I../sqlite -DP_ELECTRON -fPIC
に変更します。再度make fsしてみましょう。
pi@raspberrypi:~/console-client/pCloudCC/lib/pclsync $ make fs
<省略>
gcc -Wall -Wpointer-arith -O2 -g -fno-stack-protector -fomit-frame-pointer -mtune=native -I../sqlite -DP_ELECTRON -fPIC -DP_OS_LINUX -D_FILE_OFFSET_BITS=64 -DP_SSL_MBEDTLS -I../mbedtls/include -c -o pcrc32c.o pcrc32c.c
gcc -Wall -Wpointer-arith -O2 -g -fno-stack-protector -fomit-frame-pointer -mtune=native -I../sqlite -DP_ELECTRON -fPIC -DP_OS_LINUX -D_FILE_OFFSET_BITS=64 -DP_SSL_MBEDTLS -I../mbedtls/include -c -o pfsstatic.o pfsstatic.c
ar rcu psynclib.a pcompat.o psynclib.o plocks.o plibs.o pcallbacks.o pdiff.o pstatus.o papi.o ptimer.o pupload.o pdownload.o pfolder.o psyncer.o ptasks.o psettings.o pnetlibs.o pcache.o pscanner.o plist.o plocalscan.o plocalnotify.o pp2p.o pcrypto.o pssl.o pfileops.o ptree.o ppassword.o prunratelimit.o pmemlock.o pnotifications.o pexternalstatus.o publiclinks.o pbusinessaccount.o pcontacts.o poverlay.o poverlay_lin.o poverlay_mac.o poverlay_win.o pcompression.o pasyncnet.o ppathstatus.o pdevice_monitor.o ptools.o pssl-mbedtls.o pfs.o ppagecache.o pfsfolder.o pfstasks.o pfsupload.o pintervaltree.o pfsxattr.o pcloudcrypto.o pfscrypto.o pcrc32c.o pfsstatic.o plocks.o
ar: `u' modifier ignored since `D' is the default (see `U')
ranlib psynclib.a
他のモジュールもビルドしていきます。
pi@raspberrypi:~/console-client/pCloudCC/lib/pclsync $ cd ../mbedtls/
pi@raspberrypi:~/console-client/pCloudCC/lib/mbedtls $ cmake .
-- The C compiler identification is GNU 10.2.1
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working C compiler: /usr/bin/cc - skipped
-- Detecting C compile features
-- Detecting C compile features - done
-- Configuring done
-- Generating done
-- Build files have been written to: /home/pi/console-client/pCloudCC/lib/mbedtls
pi@raspberrypi:~/console-client/pCloudCC/lib/mbedtls $ make clean
pi@raspberrypi:~/console-client/pCloudCC/lib/mbedtls $ make
Scanning dependencies of target mbedtls
[ 1%] Building C object library/CMakeFiles/mbedtls.dir/aes.c.o
[ 2%] Building C object library/CMakeFiles/mbedtls.dir/aesni.c.o
[ 4%] Building C object library/CMakeFiles/mbedtls.dir/arc4.c.o
<省略>
[ 95%] Building C object library/CMakeFiles/mbedtls.dir/x509write_crt.c.o
[ 97%] Building C object library/CMakeFiles/mbedtls.dir/x509write_csr.c.o
[ 98%] Building C object library/CMakeFiles/mbedtls.dir/xtea.c.o
[100%] Linking C static library libmbedtls.a
[100%] Built target mbedtls
cmakeします。
pi@raspberrypi:~/console-client/pCloudCC/lib/mbedtls $ cd ../..
pi@raspberrypi:~/console-client/pCloudCC $ cmake .
-- The C compiler identification is GNU 10.2.1
-- The CXX compiler identification is GNU 10.2.1
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working C compiler: /usr/bin/cc - skipped
-- Detecting C compile features
-- Detecting C compile features - done
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/c++ - skipped
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Found Boost: /usr/lib/arm-linux-gnueabihf/cmake/Boost-1.74.0/BoostConfig.cmake (found version "1.74.0") found components: system program_options
-- Configuring done
-- Generating done
-- Build files have been written to: /home/pi/console-client/pCloudCC
pi@raspberrypi:~/console-client/pCloudCC $ make
Scanning dependencies of target sqlite3
[ 10%] Building C object CMakeFiles/sqlite3.dir/lib/sqlite/sqlite3.c.o
<省略>
[100%] Linking CXX executable pcloudcc
[100%] Built target pcloudcc
うまくビルドできたようです。最後にインストールして完了です。
pi@raspberrypi:~/console-client/pCloudCC $ sudo make install
[ 20%] Built target sqlite3
[ 80%] Built target pcloudcc_lib
[100%] Built target pcloudcc
Install the project...
-- Install configuration: ""
-- Installing: /usr/local/bin/pcloudcc
-- Set runtime path of "/usr/local/bin/pcloudcc" to ""
-- Installing: /usr/local/lib/libpcloudcc_lib.so
認識させます。
pi@raspberrypi:~/console-client/pCloudCC $ sudo ldconfig
接続してみましょう。-sオプションを付けるとパスワードを保存します。以降はパスワード入力不要です。
pi@raspberrypi:~ $ pcloudcc -u username -p -s
pCloud console client v.2.0.1
Please, enter password
Down: Everything Downloaded| Up: Everything Uploaded, status is LOGIN_REQUIRED
logging in
Down: Everything Downloaded| Up: Everything Uploaded, status is CONNECTING
Down: Everything Downloaded| Up: Everything Uploaded, status is SCANNING
event1073741824
event1073741825
Down: Everything Downloaded| Up: Everything Uploaded, status is READY
おお、接続できました!!!
ラズパイでpCloudに接続出来るとは感動です!
マウント先を指定します。
mkdir -p /home/pi/mnt/pcloud
pcloudcc -u username -p -s -m /home/pi/mnt/pcloud
/home/pi/mnt/pcloudにマウントされます。このフォルダはネットワーク・ストレージです。ラズパイ上には存在せず、クラウドと連携しています。ここにファイルをコピーすると、CloudへUPされます。
クライアントを停止するには、-kでfinalizeコマンドを送ります。
pi@raspberrypi:/media/usb0 $ pcloudcc -u username -k
pCloud console client v.2.0.1
Supported commands are:
startcrypto <crypto pass>, stopcrypto, finalize, q, quit
> finalize
停止された時にまだUpされていないファイルがある場合、~/.pcloud/Cacheにファイルがある状態です。保留中の転送ファイルが残っている状態です。このフォルダの中身がcachedだけになると、すべてアップロードされた状態であることを意味しています。
pi@raspberrypi:~/.pcloud/Cache $ ls ~/.pcloud/Cache
52000000d 54000000d 56000000d 58000000d 5a000000d 5c000000d 5e000000d 60000000d 62000000d 64000000d 66000000d 68000000d 6a000000d 6c000000d
53000000d 55000000d 57000000d 59000000d 5b000000d 5d000000d 5f000000d 61000000d 63000000d 65000000d 67000000d 69000000d 6b000000d cached
pCloudをマウントする|[無料公開]pCloudを使いディスクレスのNASを作成する
を参考に、起動時にマウントするようにサービス化しておきます。
/etc/systemd/system/pcloud.service を作成します。
sudo vim /etc/systemd/system/pcloud.service
[Unit]
Description=pCloud Command Line Client
After=network-online.target
[Service]
Type=simple
User=pi
Group=pi
WorkingDirectory=/home/pi/
ExecStart=/usr/local/bin/pcloudcc -u your_account_here
Restart=always
[Install]
WantedBy=multi-user.target
your_account_hereを、pCloudのアカウント(メールアドレス)に変更しておきます。
ユニットファイルを配置したらdaemon-reloadで反映し、pcloudサービスの起動・終了のテストを行い、pcloudサービスを自動起動するように設定しましょう。
pi@raspberrypi:~ $ sudo systemctl daemon-reload
pi@raspberrypi:~ $ sudo systemctl start pcloud
pi@raspberrypi:~ $ sudo systemctl status pcloud
● pcloud.service - pCloud Command Line Client
Loaded: loaded (/etc/systemd/system/pcloud.service; disabled; vendor preset: enabled)
Active: active (running) since Sat 2023-03-25 11:23:10 JST; 2s ago
Main PID: 15516 (pcloudcc)
Tasks: 13 (limit: 869)
CPU: 1.185s
CGroup: /system.slice/pcloud.service
└─15516 pCloudDrive
Mar 25 11:23:10 raspberrypi systemd[1]: Started pCloud Command Line Client.
Mar 25 11:23:10 raspberrypi pcloudcc[15516]: pCloud console client v.2.0.1
pi@raspberrypi:~ $ sudo systemctl stop pcloud
pi@raspberrypi:~ $ sudo systemctl enable pcloud
Created symlink /etc/systemd/system/multi-user.target.wants/pcloud.service → /etc/systemd/system/pcloud.service.
最後に、ラズパイを再起動してみて、自動マウントされることを確認しましょう。
### ドラレコ動画をpCloudにアップロードするプログラムを作成する。
プログラムの要件はざっと以下のような感じ。
* 動画ファイルのタイムスタンプを確認し、古いものからpCloudにアップロードしていく。
* USBが90%になったら古い動画から消していくため、古いファイル優先でクラウドにUp
* ファイルをpCloudのネットワーク・ストレージにコピーする。
* コピー処理は数十秒待たされることもあるので別スレッドで動かす。
* いくらかのファイルはpCloudのクライアントがキャッシュしてくれる。
* pCloudにアップロードしたファイルのタイムスタンプを覚えておき、次回はそのタイムスタンプよりも新しいファイルだけアップロードすることで、複数回アップロードしてしまわないように考慮する。
* タイムスタンプが新しいファイルは、まだ保存途中の動画ファイルかもしれないので、現在時間より2分以上(120秒以上)経過したファイルアップロード対象とする。
これを実現するためのcopy_cloud関数を作成。
最終的に、dashcamスクリプトは次のようになりました。
!/usr/bin/env python3
from usbVideoDevice import UsbVideoDevice # https://smartphone-zine.hatenablog.com/entry/2023/02/25/065957
import subprocess
import psutil # フォルダ残量確認
import os # ファイル操作に使う
import sys # プログラムを途中で終了させるのに使う
from operator import itemgetter # イテラブルから任意の要素を抜き出す
import signal # 非同期イベントにハンドラを設定する
import threading
import time # スリープ用
import shelve # 最後にクラウドへアップしたファイルの日時。これ以降のデータをpCloudへUpする
import shutil # ファイルのコピー
import datetime # 日時処理
config = shelve.open("dashcam") # 設定ファイル開く
try:
cloud_up_time = config["cloud_up_time"]
except Exception as e:
cloud_up_time = 0
print('Error: {0}'.format(e), file=sys.stderr)
print('\n------------[cloud_up_time]:' + str(datetime.datetime.fromtimestamp(cloud_up_time)))
pCloudの保存先フォルダ
pCloud = '/home/pi/mnt/pcloud/Dashcam/'
pCliudを使用するユーザ
pCloud_user = 1000
folder = '/media/usb0/'
保存形式
extension = ".avi"
デスク使用率がこの%を超えたら古いファイルを削除
dsk_usage_ratio = 90.0
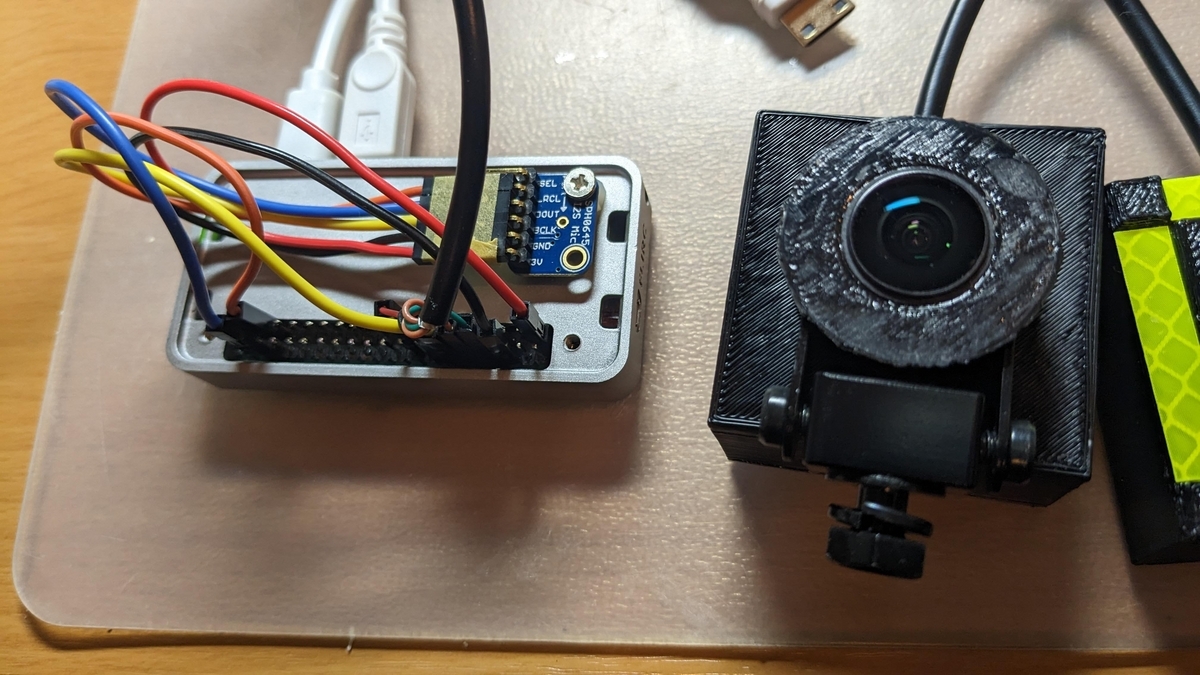
前方カメラのUSBポート番号と画像サイズ
front_cam_port = 4
front_cam_size = '1920x1080'
後方カメラのUSBポート番号
rear_cam_port = 1
rear_cam_size = '1280x720'
video_front_p = None # 録画用のプロセスです
video_rear_p = None # 録画用のプロセスです
カメラのVideoポート判定
usbVideoDevice = UsbVideoDevice()
video_front = "/dev/video" + str(usbVideoDevice.getId(front_cam_port))
video_rear = "/dev/video" + str(usbVideoDevice.getId(rear_cam_port))
Ctrl+C or KILL で止められた時の処理
def sig_handler(signum, frame) -> None:
print('\n\n\n------------sig_handler()\n\n\n')
global video_front_p
global video_rear_p
config.close() # cloud_up_timeをディスクに永続化する。
if not video_front_p is None:
# video_front_p.terminate()
video_front_p.kill()
if not video_rear_p is None:
# video_rear_p.terminate()
video_rear_p.kill()
sys.exit(1) # プログラムを途中で終了させる
録画処理
def record():
global video_front_p
global video_rear_p
video_front_p = subprocess.Popen(
['ffmpeg',
'-loglevel', 'error',
'-use_wallclock_as_timestamps', '1',
'-rtbufsize', '300M',
'-f', 'v4l2', '-input_format', 'h264', '-video_size', front_cam_size, '-framerate', '30',
'-i', video_front,
'-c:v', 'copy',
'-f', 'segment', '-strftime', '1', '-segment_time', '60', '-segment_atclocktime', '1',
'-reset_timestamps', '1',
folder + '%Y-%m-%d%H-%M-%S_f' + extension])
video_rear_p = subprocess.Popen(
['ffmpeg',
'-loglevel', 'error',
'-use_wallclock_as_timestamps', '1',
'-rtbufsize', '300M',
'-itsoffset', '-4.80',
'-f', 'alsa', '-ac', '2', '-ar', '8000', '-acodec', 'pcm_s32le', '-thread_queue_size', '256', '-i', 'dmic_sv',
'-f', 'v4l2', '-input_format', 'h264', '-video_size', rear_cam_size,
'-i', video_rear,
'-c:v', 'copy',
'-acodec', 'aac', '-ar', '8000', '-b:a', '128k', '-vol', '512',
'-f', 'segment', '-strftime', '1', '-segment_time', '60', '-segment_atclocktime', '1',
'-reset_timestamps', '1',
folder + '%Y-%m-%d%H-%M-%S_r' + extension])
def diskfree():
file_list = []
# ディスク使用率を取得
dsk = psutil.disk_usage(folder)
print('\n------------usage:' + str(dsk.percent))
if dsk.percent <= dsk_usage_ratio:
return
# ファイルデータ取得
for file in os.listdir(folder):
file_info = os.stat(folder + file)
file_list.append([folder + file, file_info.st_mtime, int(file_info.st_size / 1024)])
# 古い順にソート
file_list.sort(key=itemgetter(1))
# ファイルの削除
for file in file_list:
if os.path.isfile(file[0]):
if dsk.percent > dsk_usage_ratio:
print('\n------------[DELETE]' + file[0])
os.remove(file[0])
dsk = psutil.disk_usage(folder)
print('\n------------usage:' + str(dsk.percent))
else:
break
pCloudへアップロードする。
最後にアップロードしたファイルのタイムスタンプをcloud_up_timeに覚えておき、それ以降に作成されたファイルのみUploadする。
無限ループ処理になっているので、別スレッドで呼び出す。
def copy_cloud():
global cloud_up_time
while True:
# ファイルデータ取得
file_list = []
for file in os.listdir(folder):
file_info = os.stat(folder + file)
# UNIX時間(エポック秒)を入れてソートできるようにする。
file_list.append([folder + file, file_info.st_mtime, int(file_info.st_size / 1024)])
# 古い順にソート
file_list.sort(key=itemgetter(1))
# time.time()-120 # 2分前のUnixTimeを得る方法、(エポック秒)なので120秒を減算すればOK
# 前回クラウドにUploadしたファイルの時間(cloud_up_time)以降、且つ、2分前以前のファイルをクラウドにUploadする。
for file in file_list:
if os.path.isfile(file[0]):
if cloud_up_time <= file[1] <= time.time() - 120:
# pCloudマウントディレクトリにコピー
try:
shutil.copy(file[0], pCloud)
cloud_up_time = file[1] # 前回クラウドUploadしたファイルの時間更新
print('\n------------[upload]:' + file[0] + " " + str(datetime.datetime.fromtimestamp(file[1])))
except Exception as err:
print('Error: {0}'.format(err), file=sys.stderr)
else:
print('\n------------[skip]:' + file[0] + " " + str(datetime.datetime.fromtimestamp(file[1])))
time.sleep(1)
def main():
# スクリプトが止められたらプロセスを停止する
signal.signal(signal.SIGTERM, sig_handler) # KILLされたとき
signal.signal(signal.SIGINT, sig_handler) # Ctrl+Cされたとき
# 録画開始
record()
# pCloudへアップロード。
thread = threading.Thread(target=copy_cloud)
thread.start()
while True:
# ディスクが使用率を超えたら古いファイルを削除する
thread = threading.Thread(target=diskfree)
thread.start()
# 暫く待つ
time.sleep(60)
if name == 'main':
main()
今日はここまでです。

 バイク用 リアボックス 47L 未塗装ブラック(カーボン調パネル) スモークレンズ モノキーケース V47NNT 92472")








